Hey! My name is
An experienced cybersecurity analyst and full stack developer with a certificate in penetration testing. Co-Op Computer Science Student at the University of Toronto specializing in Software Engineering, with a major in statistics and minor in astrophysics. Active in CTFs, hackathons, programming competitions, and developing a videogame.
This site is still being ported! More of my projects are listed on my resume
Game Development

Prototype terrain sample
I am currently developing an underground-submarine openworld multiplayer
physics inspired game. As a gamer and enjoyer of large, rich maps and
depth to gameplay, I would really like to say thats what I started out
trying to create. Instead, the story goes that I had this random idea
for terrain manipulation. Games like Minecraft and Terraria use squares
and cubes, which just feels boring in my opinion. I thought I could do
something much more visceral As a sort of tech-demo/proof of
concept I programmed a shape that could be modified by boolean geometry
operations, mainly union and subtract with a second polygon. This led to
a very interesting, but quickly boring "game" to hop around in. However,
since I could drill through and place prettymuch any shape I wanted to,
it felt like I could "fly" through the land, much like a submarine
"flies" through water.
I implemented some modularly built
vehicles with use of graphs theory and object oriented programming, and
terrain generation using cellular noise. The reason I used cellular
noise is because if you look at the lines between cells, they form a
network without dead ends. Then by applying an algorithm using a density
function on depth I am able to fine tune the width and density of the
caves without impacting their interconnectedness. By using this method
chunks can generate completely independent of their neighbor, which is
optimal.
"Multiplayer is the hardest part of game dev, maybe
release that later" I have been told by a lot of people. However, as a
hobby-server configurer and network security nerd, I thought I could
take it on. I was right, however as a network security nerd I have more
layers of firewalls than I do braincells. Every single time I have an
issue with networking, its a firewall. Once I found which ports were
blocked, yes multiplayer was easy.
The result? I could fly
drilling vehicles through terrain, pop out of the ground or into random
caves, mine materials, play hide and seek with friends, and even orbit
the planet. One of the things important to me in this game was accurate
physics: thrust, torque, gravity, mass, all the fun stuff. While I am a
physics minor, I am more importantly a heavy player of physics and
rocket science games such as Kerbal Space Program. I was able to glide
through AP physics simply because it just part of the games world, it included everything we would
learn in the classroom. Realistic physics also added to the depth of
gameplay I was looking for.
After some formal computer
science education, I discovered new ways to more efficiently implement
many of the algorithms I had initially generated and rewrote them
...multiple times. Currently everything runs buttery smooth and
framerates are high due to efficient caching of unloaded chunks,
multithreaded chunk generation, gpu accelerated compute shaders to
modify chunk density, enhanced use of object oriented programing and
graph algorithms to build massive modular vehicles, authoritative server
networking to disable hackers, and other performance tweaks.
So this sounds amazing, where's the game? Well, a game needs graphics, audio,
a sound track. As much as I'd love to release it now, its unplayable for
these reasons along with a few minor implementations left such as NPC's and
reworking the tech tree.
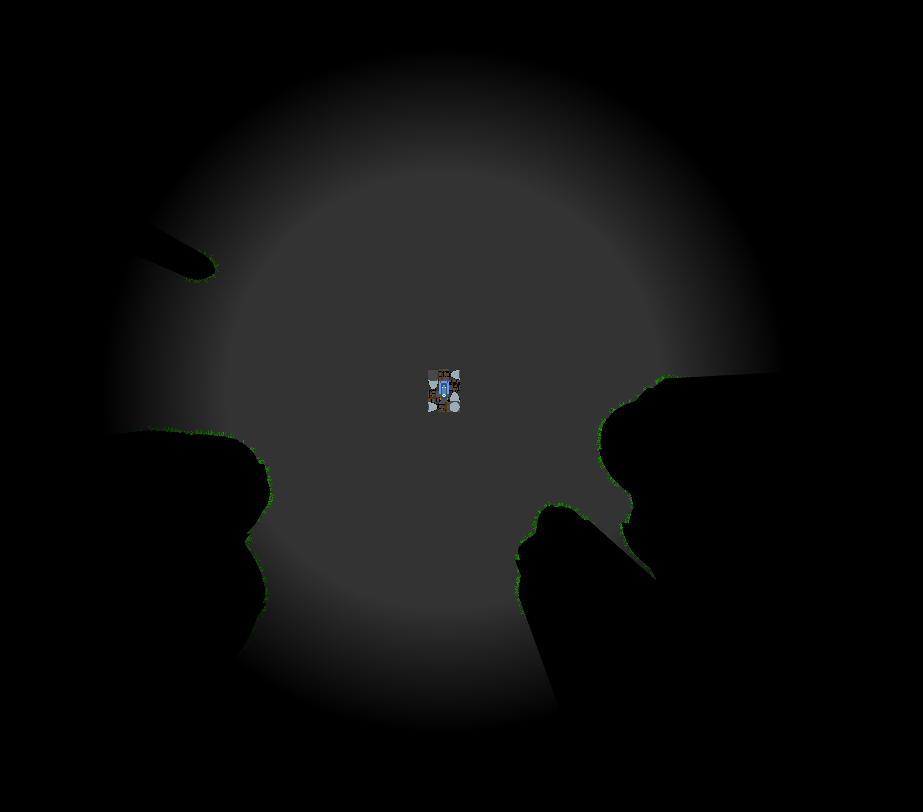
A grid flying through caves
Servers & Networking
Open source and networking hobbies led me to depoly a set of interconnected Linux servers:
NGINX Reverse Proxy and VPN Server
This server is the internets access to all of my other servers, and the glue holding them together. I was using IPTables briefly but have moved to NGINX to forward traffic from specified ports onto private servers connected to it. This device doubles as a Wireguard VPN server which in the past connected servers on the same virtual network, however I have switched to reverse ssh tunnels to connect other servers to this one. The VPN is still useful for odd networking tasks and troubleshooting.
Lightweight Server
Running on Raspberry Pi, this servers main job is to run Subterstrike servers, Minecraft servers, other game servers, and this website you're looking at.
AI & FTP Server
A powerful computer with an RX 6950 XT GPU runs my local generative AI servers including Invoke AI for Image Generation, Ollama and Open-WebUI for LLM services. As this is also my primary device with a few spare terabytes of NVMe storage it contains a VSFTPD file server. By the way, this server runs on Arch Linux :)
Derelict Laptop Promoted to Server
An ancient gaming laptop with significantly more computational performance than physical durability was promoted to server, where it runs my Nextcloud self hosted office suite. While originally this was a 'because I can' project, I felt justified when I later saw Microsoft announcing USA demands come before Canadian privacy.
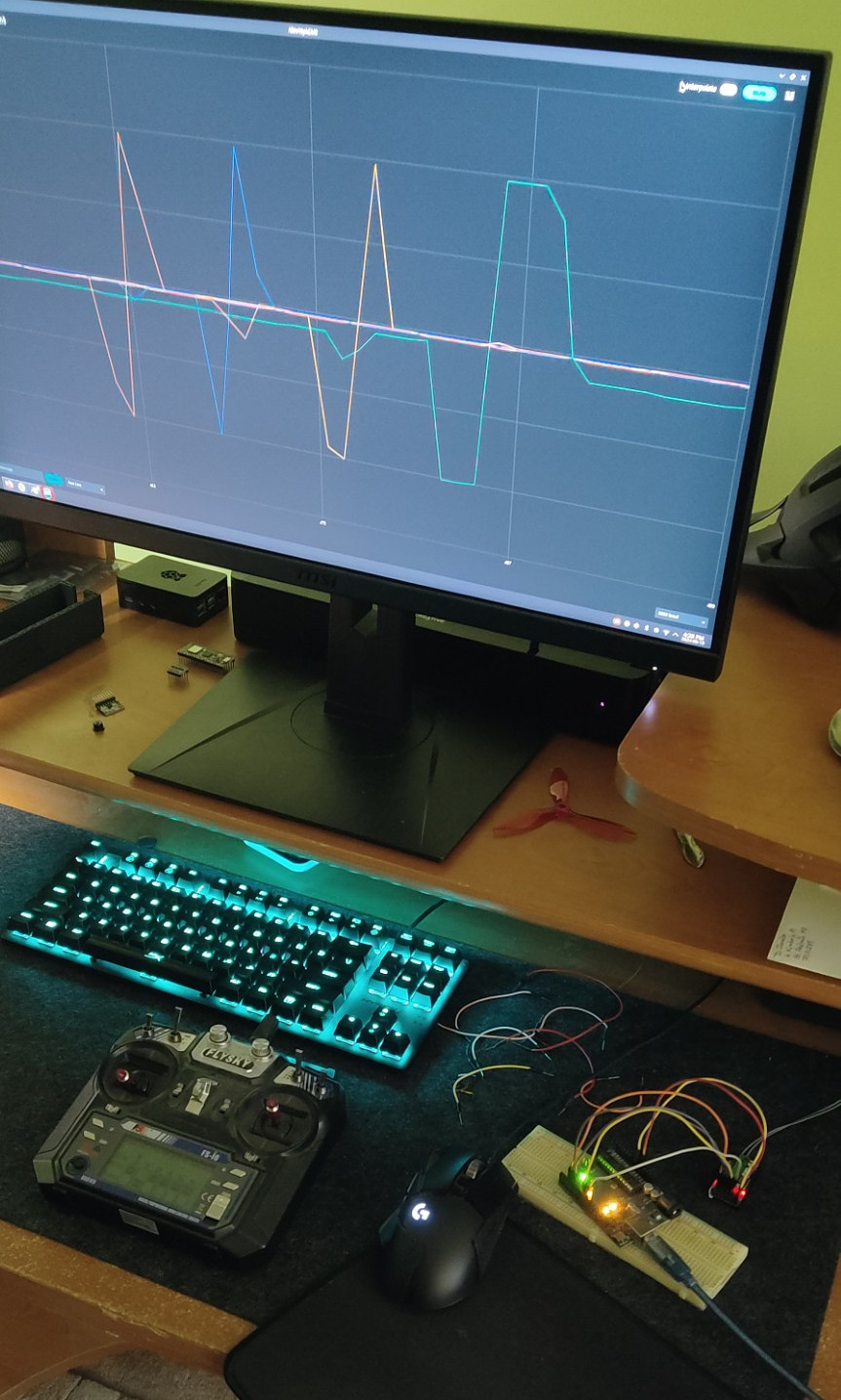
Testing Input Response
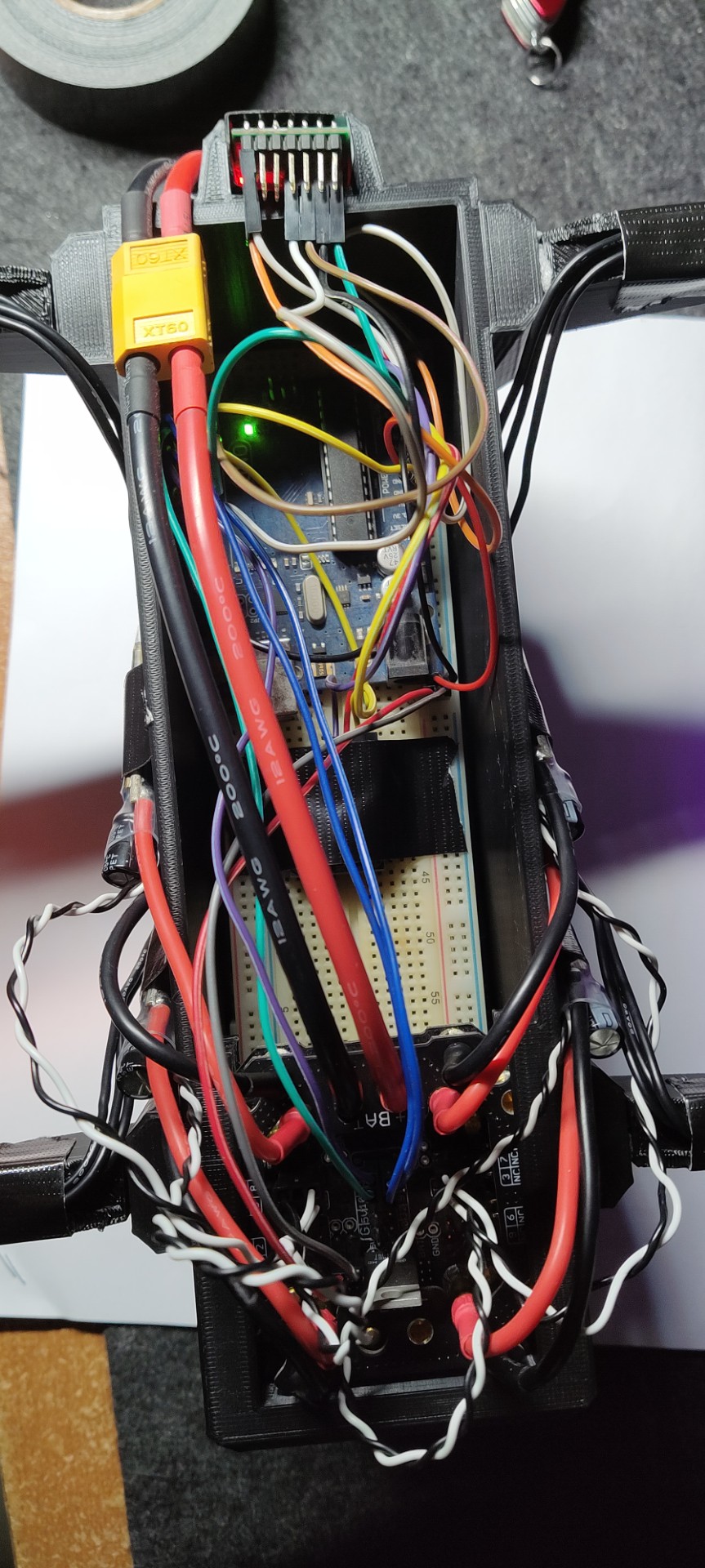
Internal View
Building a UAV
I chose to build a drone from scratch for my AP Physics final project.
We were given an open ended assignment to build something cool and I wanted a drone. My choice was much more ambitious than the course required,
and took quite a while to complete.
For the drones frame I finally had an excuse to purchase a 3d printer. I
modelled the frame and arms modularly to support future upgrades and
replacements from damage, reducing the cost of operation. Initially I
was using some 3d printed torodial propellers due to their higher
efficiency and lower sounds usage. Due to safety concerns of the
propellers not withstanding tension at higher RPMs and exploding I
switched to some generic acrylic propellers I bought. A challenge in
designing the frame was leaving enough room to contain the volume of the
wires. I went with the Elegoo Neptune 3 as the printer was open-source
and had a much better cost-to-utility than proprietary printers such as
the Ender series. I am not sponsored I just really like the printer.
The flight computer was the most difficult part to program. Using an
ultrasonic distance sensor, gyroscope, and accelerometer the drone has
enough information to probably never crash. The autopilot is implemented
on an Arduino UNO using a PID controller for stabolization. The autopilot quality is currently impacted every time
the drones mass distribution changes, which can be fixed with a reinforcement
machine learning algorithm. For the higher level programming such as flight
automation, video transmission and WiFi communications I used a Raspberry
Pi Pico. There is also a 2.4GHz line of sight receiver for manual control.
A future upgrade may contain a SIM card for near-infinite remote control
connection, but drone regulations would make this difficult.
The power system is the most physically challenging portion of the
drone. The motors took 14.6 Volts, while the UNO microcontroller took 5
Volts, and the Pico and most sensors run at 3.3 Volts. All of the power
to the motors ran through the power distribution board, which I modified
to also output the lower voltages and used Bidirectional Logic Level
Converters to shift between 3.3 and 5V signals where needed. A potential
flaw with having all the power coming from the same source is spikes in
energy consumption to the motors may cause the microcomputers to receive
too little power, which could be fixed with a capacitor. Luckily, I
haven't experienced this yet as the 2C discharge rate on the 2.5Ah
capacity battery is more than enough. Having a battery this big does
mean it takes up about half the internal electronics volume and is half
of the drones mass, but it can also maintain full throttle for half an
hour making for long flights.
The motors I used were a bit overkill for a 1.1kg drone, as going past
20% throttle sends it shooting through the sky -- which is not a bad
issue to have. Here's the technical numbers behind that: I have
propellers with a 6cm radius on motors with a 2450KV rating (2450 rpm
per volt) at peaking at 14.6 Volts. From this the tip speed is computed
to be ~225m/s under no load at max throttle, quite a lot more than what
is safe or necessary to get into the air.
Phobos
One of the coolest things I've developed is a game, fully written in
assembly.
I say this because it is the perfect intersection of many things I enjoy;
low level programming, physics, space, simulation development, and game design.
Also small enough of a project that I could complete it in under a couple
of months, so another win. I even named the game based on the emulator, as
Phobos is a moon of Mars
The instructions for this
assignment were very broad, to develop a platformer game in assembly.
This left a lot of room for creative freedom, especially due to the
loose definition of platformer. With infinite time I would have
developed a whole rocket simulator, and used the justification that the
launchpad was a platform.
On the technical side this was a very difficult project. There are
only about 16 variables actually usable in MIPS, and a lot of them are reserved
to specific logical controls under best practice. Then following the many
loops and recursive, real-time functionality required extensive and efficient
use of the stack. Ideally accessing a few bytes shouldn't strike the fear
of low framerates to mind, but the Mars-MIPS emulator I was using was far
from efficient.
Notable Features
- Raycast collision detection and repositioning
- Sub-pixel velocity and positioning
- Awesome pixel graphics (the rocket shoots fire!)
- High framerates (for a low-performance emulator)
- Enemies shooting at you!
- Loot pickups
Probably the most annoying part of this was that the emulator couldn't
handle simutaineous key inputs. Fortunately I have over a thousand hours
experience landing rockets on the Mün so I was comfortable giving a few unique key inputs per second. I never imagined
this is something I would be proud, and I still don't think I am. However,
it works.
At this point you may have realized I am a bit of a
space nerd. Enjoy this recording I made at 1am demonstrating the
features of my game to a TA, compressed to the point that the audio has
texture.
The source code is also available for your enjoyment.
Work Experience
Cybersecurity Analyst for Equifax
- Analyzed Security Posture, Business Risk, Compliance
- Supported Vulnerability Management sourced from Penetration Tests & automated tools
- Handled issues, exceptions, and deviations
- Provided Security Advisment Services for infrastructure and code development
- Used automated scanning tools, GCP, AWS, shell scripts, Linux
Software Developer for Parkside Pool
This is a role that didn't exist before me. I was a lifeguard and swim instructor here, and the pool I worked at was being swamped with administrative work. Eventually I took on this work for the money that came with it. For ten hours each week, I would be reading emails, co-ordinating lessons, and sending out schedules. Creating the schedules was a tedious task, with siblings at different levels needing back to back lessons, people not available some days or times, and other various soft and hard requirements.
Soon I found out there is no easy algorithm known for finding solutions to problems with many soft and hard requirements. This is a NP-hard and is described in the Nurse Scheduling Problem. Fortunately there was a cap of 128 students I could fit into classes per week and the final algorithm was around O(n³) for n swimmers, so the runtime wasn't horrible.
Implementing the reception and confirmation of lessons was straightforward enough with a Flask site using Stripe for payments, and Firebase service for sending confirmation emails.
Volunteering
I volunteer within the Computer Science, Mathematics, and Statistics department at the University of Toronto as a Computer Science Ambassador to help cultivate interest in the Mathematical Sciences in high school students, as well as providing direction for first year students within the programs.